
While pill sized capsule endoscopes are increasingly used as wireless imaging devices for diagnosing diseases in the gastrointestinal (GI) tract, they are limited to passive imaging or sensing applications only. Therefore, many researchers have been proposing active robotic capsule endoscopes that can be position controlled to enable active imaging of the GI tract and enable new advanced diagnostic or therapeutic functions such as drug delivery, in situ tissue property measurements, biopsy, and cauterization. However, such robotic capsules are not available yet for any clinical or personal use yet due to challenges in their actuation, locomotion, powering, and safety. Therefore, this project aims to propose solutions against these challenges by designing and manufacturing new pill sized soft (shape deforming and recovering) capsule robots with remote actuation and control. These magnetically actuated soft capsule endoscope robots are actuated by an external permanent magnet and they use a novel rolling based surface locomotion method inside stomach and possibly other regions of the GI tract for clinical and potentially personal use for advanced new diagnostic and therapeutic functions.
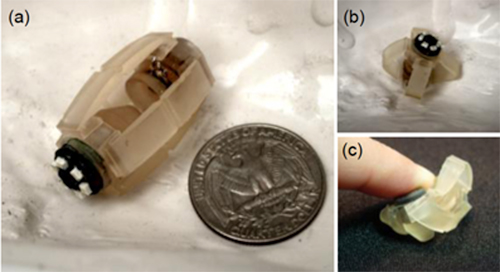
Above: A MASCE prototype: (a) Its photograph with a US quarter; (b) Fully compressed capsule using external magnetic attraction; (c) Its shape-deformation demonstration when compressed manually.