
Researcher:
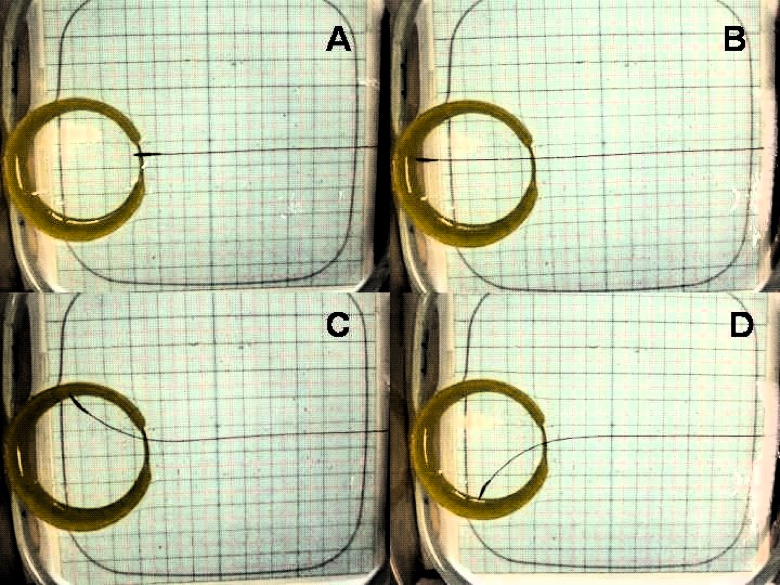
We have developed a technique to accomplish proportional steering control of a flexible needle by controlling the orientation of the needle and rotating it with a variable duty cycle during insertion. This approach makes it possible to reach deep lesions with high accuracy using an extremely narrow probe. Both of these characteristics offer important advantages for a number of clinical applications. We have applied the technique for neurosurgery and percutaneous kidney access. To date we have demonstrated the technique in vitro in artificial media (as in the photograph above) and in human cadavers.