
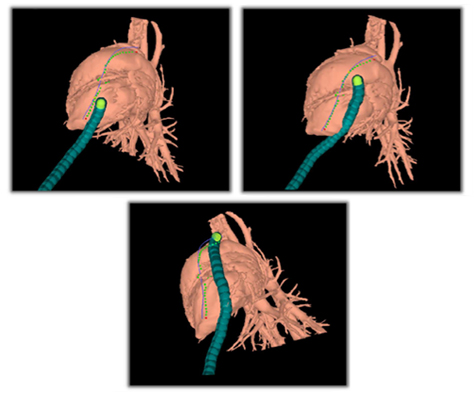
Minimally invasive surgery (MIS) has been shown to reduce patient trauma and shorten hospitalization stays, but when operating through a small incision, a surgeon loses the “bird’s eye view” of the operation that he or she is accustomed to with open surgery. A recent approach to surgical guidance, called image-guidance, combines tool tracking with patient specific rendered organ models to display a detailed computer generated 3D rendered visualization that the surgeon can rotate the 3D rendered models on the computer screen to gain a better spatial understanding of where the tool or robot is located with respect to an anatomical target (see at left).
Current image-guidance systems are limited to only specific surgeries, can be inaccurate, and do convey all available information. The goal of our Medical SLAM project is to improve the accuracy and efficacy of IGS through the adoption of mobile robot simultaneous localization and mapping (SLAM) algorithms to the medical field. SLAM is the problem of estimating an environment map with a mobile robot while simultaneously estimating the pose of the robot in the incrementally constructed map. The advantages of using SLAM for surgery are 1) the potential improvement in accuracy, 2) the estimation of dynamic information, and 3) the inference of deformation and stiffness.